
티스토리 뷰
이전포스트 보기
Extracting the grid
Merging lines
선을 합친다는건, 근처의 선들을 평균낸다는 것을 뜻한다. 그래서 특정 반경에 있는 선들은 결국엔 같이 합쳐질것이다. 우리는 선을 합칠 수 있는 함수를 만들어 볼것이다.
이 함수는 다음과 같이 호출될것이다.

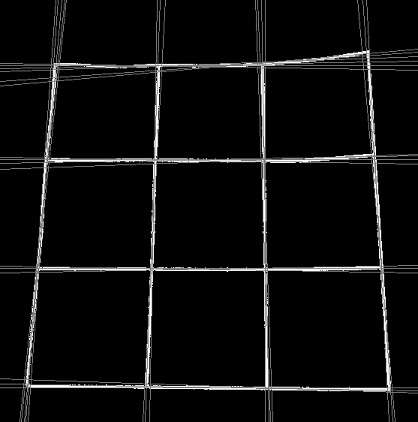
이전 포스트에서 HoughLines을 사용했고 결과는 위의 사진과 같았고, 따라서 mergeLine이 필요했다.
mergeLine 함수는 brute force방식으로 접근하는데, 한 선을 중심으로 다른 모든 선을 비교해서 합칠만 하면 합친다는거다. 이건, 이중 for문으로 구현한다.
함수는 다음과 같이 시작된다.

iterator를 통해 array lsit를 순회하는데 이걸 두번 겹쳐사용해서- nested loop(이중 for문)을 구현한다.
vector의 각 엘리먼트는 두 정보를 포함하고있는데 rho와 theat이다. 왜, rho와 theta를 저장할까? 그 질문은 여기서 대답할 수 있다.(클릭)
짧게말하면, 선은 rho와 theta로 정규화로 표현할 수 있고, openCV에서 제공하는 함수들은 종종 rho와 theta를 반환한다.
이렇게 합치는 과정을 통해, 몇 몇 선들이 합치게 될것이다. 이 과정에서 우린 이미 합쳐진 선들을 마킹해놓을 필요가 있는데 rho와 theta는 각각 0과 -100으로 설정될것이다. 왜 그럴까?
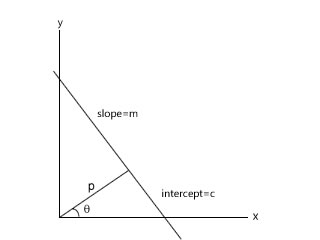
rho는 직선까지의 거리(즉, 수직 선의 길이), theta는 이 수직 선과 x축의 각을 뜻한다.
rho = x*cos(theta) + y*sin(theta) 이다. 절대 0이면서 -100일수가 없다. 따라서 rho와 theta를 각각 0과 -100으로 설정할것이다.
우선, 설정하는 것은 함수 마지막단에서 나올것이고, 이미 0과 -100이면 함수내용을 수행하지 않는다는 코드를 삽입할 것이다.
현재 vec2f의 0에는 rho와, 1에는 theta가 있는데, 우선 저장하여 사용할겁니다.
이 두 정보를 이용해서, 선 위의 두 점을 찾을 수 있다. 계산이 익숙치 않다. 어쨌든 찾는다..(ㅠ..ㅠ..)

theta 가 45*3.14 초과, 135*3.14 미만일때와, 그 반대일 때를 따로 처리해준다. 이게 또 어떻게 구하는지는... 나는 구면좌표계에 매우약한데, 친절한 지나가시는 행인분께서 이게 정확히 어떤 건지 댓글로 설명해주면좋겠음.. OTL...
어쨋든 이렇게 주 점을 찾은 뒤, 그 외의 점을 순회해본다. nested loop가 사용된다.

위와 같이 for문을 한개 더 넣는다.
그리고 주 선(current) 과 현재 순회하는 선(pos)과 같으면 넘긴다. (동일한 선을 합친다는 건 아무런 의미가 없다.)
그리고 주 선 rho와 부 선 rho의 차이(float absolute)가 20이하이고, 주 선 theta와 부 선 theta의 차이가 10/180이하이면 두 선은 합칠 수 있는 가능성이 있다.

그리고 그 경우에만, rho와 theta를 저장한 뒤 pos 선 위의 두 점을 찾는다.

그리고 충분히 가깝다면, 그 두선을 합친다. 그리고 pos 선의 상태를 불가능한 선의 위치 상태로 설정한다.

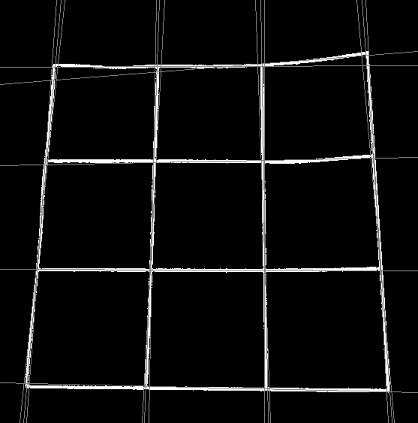
그리고 다음과 같이 메인 소스에서 사용되는데 결과는 다음 아래와 같다.
제일 좋은 선 찾기

우리가 원하는 네 선의 변수를 생성하는데, 초기값은 위와 같이 과장되게 설정해주었다. 그다음 우리가 이전에 구했던 lines 벡터들을 순회한다. mergeLines 함수에서 이미 merge되었던 선들은 rho와 theta가 각각 0, -100으로 설정되었음을 기억하라. 이걸 사용해서 합쳐졌던 선들은 skip할것이다.

이 수행이 끝난뒤에는, 우리는 가장 좋은 선들을 얻게될것이고, 이 선들을 시각화하려면 다음과 같은 수행을 하면된다.


이런 결과를 얻을 수 있다. 길고 긴, 길고 긴 수학 연산뒤에 드디어 4개의 선을 구했다.
이제 네 선의 교차점을 연산해야한다. 선이 주어졌을 때 교차점을 연산하는 법 링크
먼저 각 선의 두 점을 찾은뒤, 수학적인 작업을 수행 한뒤에, 두 점이 어디서 교차하는지 구할 수 있다. 코드는 아래와 같다.

위 코드는 선에서 두 점을 찾는데, 우측선과 좌측선은 if 구문이 필요하다. 왜냐하면 두 선은 정확히 수직일 수 있고, 이건 기울기가 무한대일 수도 있다는 것을 뜻한다. 컴퓨터는 무한대를 표현할 수 없기 때문에, 조금 안전한 방법으로 작업을 수행이 필요하기에 if 처리가 필요한것이다.
이제 밑에서부터 진짜 교차점을 찾는다.

이제 교차점을 구했으니, 왜곡된 원근점을 수정할 수 있다. 이 작업은 스도쿠를 마치 위에서 쳐다보는 것과 같이 사진을 수정하는 작업이 주 목적이였다. (본 포스터의 젤 위에 적어놨었다.)
자. 먼저는 퍼즐의 가장 긴 변을 찾을것이다. 왜냐하면 새 이미지는 가장 긴 변의 제곱만큼의 넓이가 될 것이다.
우선 가장 긴변을 찾은 뒤 maxLength에 저장한다. 그리고 제곱근을 수행하면 실제 길이를 구할 수 있다.
그 다음 source와 destination point를 생성한다.

원 이미지의 스도쿠 퍼즐 왼쪽 상단 점은 새이미지의 (0, 0) 과 같아야하고..원 이미지의 스도쿠 퍼즐 우측 하단 점은 maxLength-1, maxLength-1 과 같아야한다.
그리고 우린 새 이미지를 만들고 undistortion을 수행하고, 수행된 이미지는 다음과 같다.


음.. 왜이렇게 뿌옇게 나올까... 그게 궁금하다. 블로그엔 아래처럼 깔끔하게 나오던데,. 알아봐야겠다.
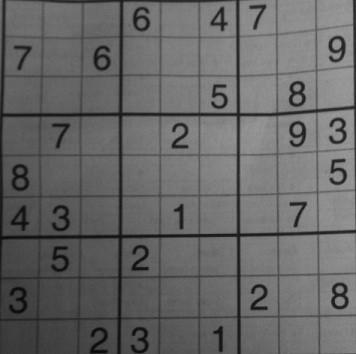
뿌옇든 선명하든, 어쨋든 숫자 인식하는데 큰 차이는 없을것같다.(과연?, 문제가 될거같기도 하니까 이 문제도 해결하는 쪽으로 방안을 구해놔야할것같다.)
이것까지했으면, 이 새이미지에서 가로 길이를 9로 나누면 각 column이 될것이고 세로 길이를 9로 나누면 각 row가 될것이다. 그다음 숫자를 인식하면 어디 (i, j)에 어떤 숫자(1~9)가 들어가있는지 알게되겟지.
이 모든 작업이 우리가 수행하고 싶었던 일이였다.
review를 해보자면, 이제까지 우리가 했던것은
1 임의의 이미지에서 가장 큰 상자를 뽑아내기
2 가장 큰 상자의 네 선을 찾기
3 네 선의 교차점을 찾기
4 교차점을 각각 새이미지의 왼쪽상단 우측상단 좌측하단 우측하단에 맞추기.
였다.
이제 OpenCv에서 Digit Recognition을 주로 KNN 알고리즘을 수행해서 하는데,
그러니까 숫자를 인식하는 머신러닝? 코드를작성할 것이다.
하 쉽지않다 쉽지않다. python으로 작성했으면 라이브러리 뚝딱 먹방하는데, C++로도 짜보고싶기도하다. 그리고 solution도 C++이긴한데,
문제는 내 작업환경이 raspberry pi인점과 솔루션이 windows 환경인 점이 다르므로, 또 다르게 적용되는게 있을까.. 도 신경써야하고, 어느정도 kNN 개념을 잡아야하기 때문에 이것만큼의 긴 포스트가 또 필요할 것같다.
나도 취업을 위해서라면, 이런 자기계발도 필요하긴하겠지. 나도 취업을 하고싶응게,,, 좋은데루.
열심히해보자.
다음포스트보기
K-Nearest Neighbors for Machine Learning
'IoT 과정' 카테고리의 다른 글
| sudoku grabber 2 Grid detection (0) | 2017.11.23 |
|---|---|
| sudoku grabber in Opencv (0) | 2017.11.23 |
| 임베디드 관련 블로그 (0) | 2017.09.08 |
| 라즈베리파이와 개발pc와의 nfs 설정 및 tftp등등 (0) | 2017.09.07 |
| LVM & RAID (0) | 2017.07.19 |
- Total
- Today
- Yesterday
- javascript
- 백준
- Arena
- 시뮬레이션
- 명제논리
- 엄청난 인내심과 시뮬레이션을 위한 아레나 툴
- 대규모 시스템 설계 기초
- 가상 면접 사례로 배우는 대규모 시스템 설계 기초
- 아레나
- flutter
- arena simulation
- 이산수학
- 아레나시뮬레이션
- 조합 코딩
- paul wilton
- Trie
- 로젠
- 자바스크립트 예제
- 아레나 시뮬레이션
- 이산 수학
- 데이터 중심 애플리케이션 설계
- Propositional and Predicate Logic
- 자바스크립트
- rosen
- 최단경로 알고리즘
- beginning javascript
- Simulation
- Discrete Mathematics
- grafana cloud
- 그라파나
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | |||
| 5 | 6 | 7 | 8 | 9 | 10 | 11 |
| 12 | 13 | 14 | 15 | 16 | 17 | 18 |
| 19 | 20 | 21 | 22 | 23 | 24 | 25 |
| 26 | 27 | 28 | 29 | 30 | 31 |